


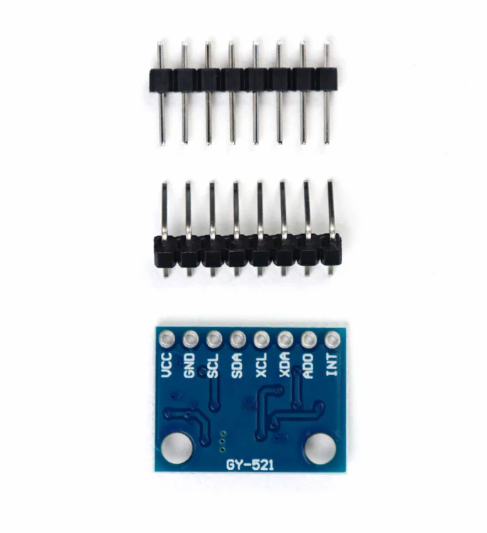
The MPU-6050 3-Axis Accelerometer and Gyro Sensor module use MPU-6050 which is a little piece of motion processing tech. The MPU6050 datasheet is available in the attachment section to get this visit.
There are different types of magnetometer are available the basic differences between MPU6000, MPU6050 and MPU6500 is:
| MPU6000 | MPU6050 | MPU6500 |
| 1. A sampling rate of 8 kHz. | 1. A sampling rate of 8 kHz. | 1. A sampling rate of 32 kHz. |
| 2. Supports SPI and I2C interface. But I2C is too slow to handle 8 kHz gyro update. | 2. Supports I2C interface communication protocol. | 2. Supports both I2C and SPI interface. |
| 3. Vibration Sensitivity is better than MPU6500. | 3. Vibration Sensitivity is better than MPU6500 but the speed of operation is less than MPU6000. | 3. It is more susceptible to vibrations, so the need for some vibration isolation methods.
It is faster than both MPU. |
The MPU6050 devices combine a 3-axis gyroscope and a 3-axis accelerometer on the same silicon together with an onboard Digital Motion Processor (DMP) capable of processing complex 9-axis MotionFusion algorithms. To get more insights about specifications visit the MPU6050 datasheet.
If you want to Explore more about Accelerometer Then click on, Accelerometer and Gyroscope
Features :
- Chip built-in 16bit AD converter, 16-bit data output.
- I2C Digital-output of 6 or 9-axis MotionFusion data in rotation matrix, quaternion, Euler Angle, or raw data format.
- Selectable Solder Jumpers on CLK, FSYNC, and AD0.
- Digital Motion Processing™ (DMP™) engine offloads complex MotionFusion, sensor timing synchronization, and gesture detection.
- Embedded algorithms for run-time bias and compass calibration. No user intervention is required.
- Digital-output temperature sensor.
Package Includes:
1 x MPU-6050 Gyro Sensor 2 + Accelerometer.
1 x 1*8 Burg connector Pins(Right angle).
1x 1*8 Burg connector Pins(Straight).


There are no reviews yet.